Let’s Build Our Most Popular DIY FM Radio Soldering Kit
Welcome to our DIY FM Radio Soldering Kit tutorial! Are you an electronic hobbyist, enthusiast, or college student looking to
Read MoreHow To's, Reviews, and Product News from Circuit Specialists HQ.

Welcome to our DIY FM Radio Soldering Kit tutorial! Are you an electronic hobbyist, enthusiast, or college student looking to
Read More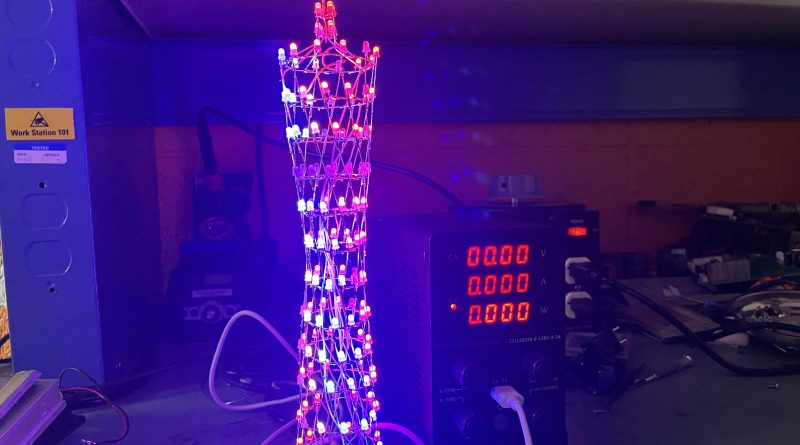
Deceptively simple in design, yet demanding in execution, our DIY 155 LED Canton Tower project is the ultimate test of
Read More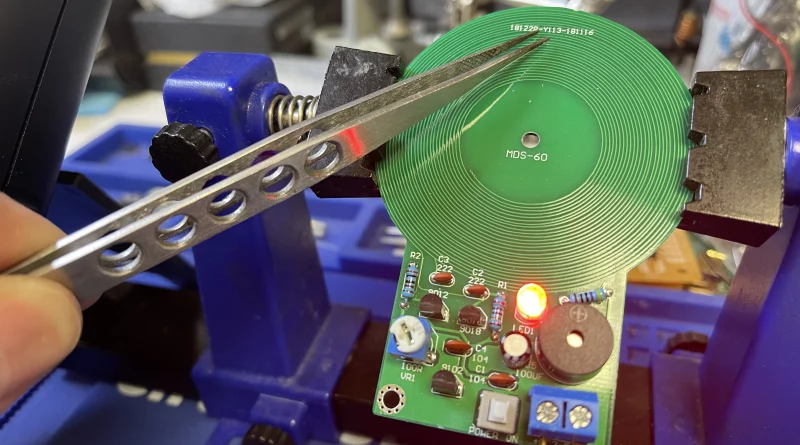
Welcome to this exciting DIY project, where we’ll build a simple yet functional metal detector using just a few components,
Read More
When it comes to choosing the right oscilloscope for your electronic troubleshooting and design needs, the options can be overwhelming.
Read More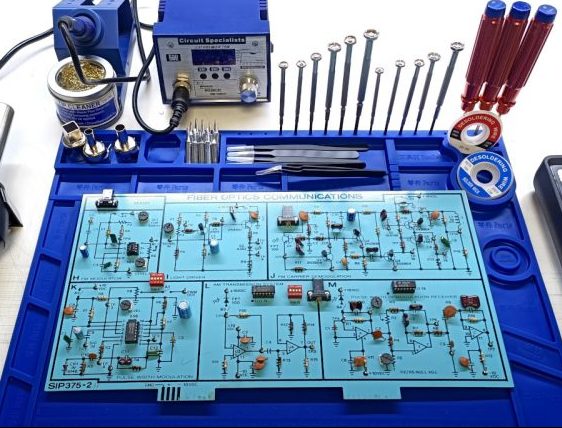
Are you a repair technician, or electronics enthusiast looking for a reliable soldering station? Look no further! Our expert Circuit
Read More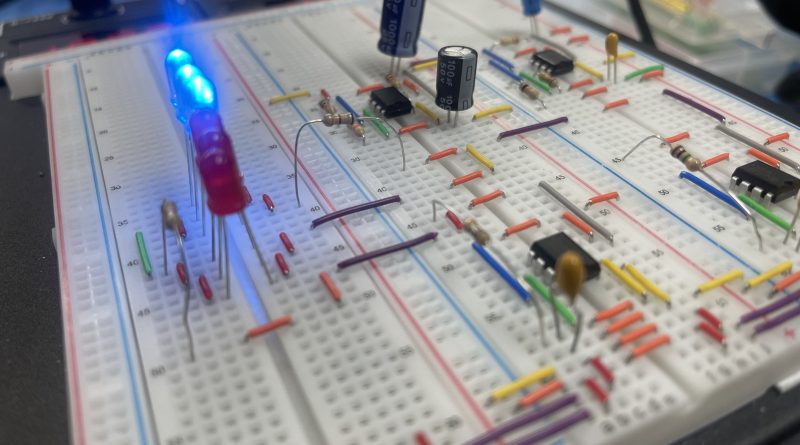
Prototyping is an essential step in the electronics design process, allowing makers and DIY enthusiasts to test and refine their
Read More
Micro-switches are a crucial component in modern electronics, enabling swift and reliable switching in various smart applications. These tiny switches
Read More
Get Creative with Circuit Specialists Get ready to celebrate Independence Day with creative DIY Fourth of July Decorations! This tutorial
Read More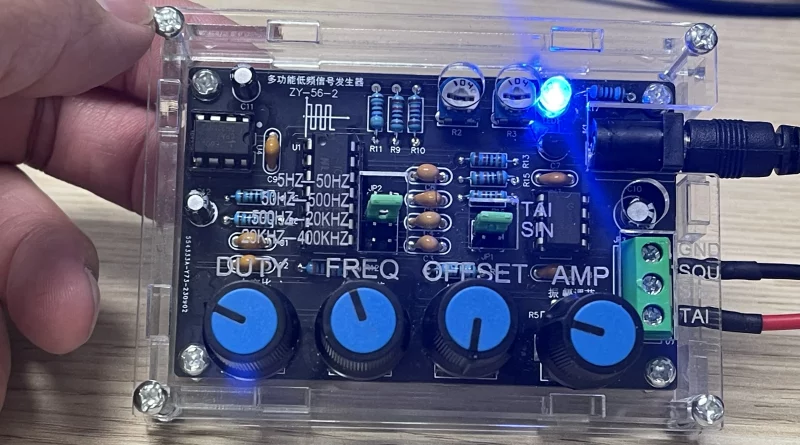
Welcome to this DIY Low-Frequency Waveform Generator Soldering Project tutorial, where you’ll learn to build a signal generator capable of
Read More
Welcome to the LED Rotating Ferris Wheel DIY Kit, a fun and interactive project that combines electronic building with learning
Read More