STEPPER MOTOR MODES OF OPERATION, STEPPER MOTOR CONTROLLER OVERVIEW, AND INFORMATION REGARDING MULTI-AXIS MOTION CONTROL
Stepper motors have three modes of operation — full, half, and microstep — and a stepping motor’s step mode output is determined by the driver’S design.
Full-Step
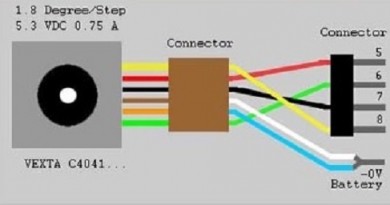
Typical hybrid stepping motors combine the strengths of variable reluctance and permanent magnet motors. They usually have two hundred rotor teeth, i.e. two hundred full steps for each revolution of the motor shaft (or one point eight degrees per step). Full-step operation is attained by energizing both of the motor’s windings while alternately reversing the current. A single pulse from the stepper motor’s generator equals one step.
Half-Step
In half-step operation the stepper motor rotates at four hundred steps every revolution. One winding is energizing after the other which makes the motor rotate halfway (point nine degrees). While half-step operation offers smoother rotation than full-step, it provides roughly thirty percent less torque.
Microstep
Microstep operation divides each step into two hundred fifty-six discrete microsteps which allow fifty-one thousand two hundred steps for each revolution (point zero zero seven degrees per step). Microstepping is generally used in situations where one needs highly accurate positioning and fluid motion throughout a larger range of speeds. As with half-step operation microstepping improves motion control at the cost of reduced torque.
A stepper motor’s windings are connected in either series or parallel: series connections offer more torque at low speeds whereas parallel connections lower the inductance, allowing more torque at faster speeds. The stepper motor’s torque versus its speed is dependant on the driver output voltage. The drive should be current-limited in relation to the stepper motor rating because the driver’s output can be rated as much as twenty times higher than the motor’s voltage.
Stepper Motor Controllers
The stepper motor controller (or indexer) delivers step and direction outputs for the driver and most stepper motor functions require the controller to regulate acceleration, deceleration, steps per second, and distance. In addition the stepper motor controller is able to receive various high-level commands from a host and generate the appropriate step and direction pulses for the driver. A stepper motor controller can operate independently as well (i.e. without the host).
Multi-Axis
Multi-axis motion control systems are used when one is using more than one stepping motor. An ordinary multi-axis system can be connected to up to four stepper drives with each drive connected to its own stepper motor. This multi-axis hub enables coordinated movement in situations where one needs the utmost synchronization (e.g. circular or linear interpolation).